Rover Mini ECU (MEMS) Monitor 関係の記録。関数型言語HaskellでIoTを楽にしようという無謀な試み。
Haskellで作ったアプリのアイコンをラズパイのデスクトップにおく
自分のための覚書。 <application-name>.desktopにいろいろ書くのだが,Exec=lxterminal -e “<application-path>”. Terminal=f […]
ようやくラズパイで稼働
Rover Mini 1.3i の車載コンピュータ(ECU)のモニタ,Haskell プログラムの ラズパイでのコンパイルに手間取っていましたが,ようやく,稼働しました。
Rover Mini 修理後の状況
ほぼ一年近くかかったRover Miniの修理がようやく終わり,業者さんから戻ってきた。昨年初夏,クーラーの効きが悪いのを直してもらうつもりで修理に出し,2週間くらいで戻ってくるかなと気楽に考えていたのが甘かった。 結局 […]

Rover Mini ECU モニタの Web アプリ版がある
Rover Mini の ECU リーダー,Web App として提供されているサイトがありました。 ケーブル と Mac/PC と Google Chrome さえあれば,簡易モニターが出来上がりです。パソコンの処理能 […]
HaskellでつくるRover Mini ECUモニタ
暫く進捗がなかった「Haskell でつくる Rover Mini ECU (MEMS) モニタ on ラズパイ」プロジェクト(長い!)ですが,最近ようやくちょっと前進しました。 何が進捗したかというと,ラズパイで実際に […]

MEMS(ECU)モニタ開発状況 GHCのバグ?環境整備の問題?
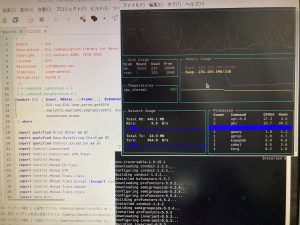
インジェクション・ローバーミニの車載コンピュータのモニタリング,Macではstack環境下で順調に開発・運用していますが,ラズパイでの運用は未完。stackでのコンパイルがまだできないので,ghcで直接コンパイルをしてみ […]

ECUモニタ開発状況
ローバーミニ,すでにクラッシックカーの領域に入りつつありますが,1992年以降に日本で新車として販売されたミニにはインジェクション方式が導入され,制御用のコンピュータECUも載せている。趣味として関数プログラミング言語 […]
【追記あり】MEMSプロトコルのページ
【追記 2020.10.10】下記のbearinghead.comサイトが見られなくなっていた。検索したところ,こんなサイトを発見。 MEMS Monitor作成の際に参考にしているMEMS のプロトコルが記載されている […]
stackとraspberry pi
raspberry pi で stack buildできなかった問題,解決 Rover Mini の ECUデータ読み出しプログラムを動作させるためにRaspberryPiを用意したのだが,Haskellのコンパイルがs […]
そして午後は別の事業者さんを訪問
そして午後は別の事業者さんのところへ新商品開発の状況聴取と経営相談に行ったのですが,先程ご紹介したとおり,途中でコンビニに立ち寄って停車しようとしたら突然のラジエータ液噴出でびっくり。ちょっと皮膚が赤くなったくらいで幸い […]


